Satellieten en andere onbemande ruimtevaartuigen krijgen tot nu toe hun instructies van de vluchtleiders op aarde. Dat heeft meer nadelen dan voordelen. Vandaar dat er hard wordt gewerkt aan de ontwikkeling van zelfdenkende boordcomputers. Deze zoeken zonder rechtstreekse menselijke inmenging vanaf de grond hun eigen weg door het universum. Zij bepalen zelf welke taken ze gaan verrichten. De slaagkans van ruimtemissies gaat drastisch omhoog. Evenals de kwaliteit van het ruimteonderzoek.
Ruimtesondes vlogen tot nu toe ‘blind’ door het heelal op weg naar exotische hemellichamen en onbekende verten. Slechts de vluchtleiders op aarde bepaalden waar hun weg naartoe zou leiden en welke opdrachten ze moesten uitvoeren. Maar daarin is verandering aan het komen. Satellieten krijgen zelfdenkende boordcomputers die zonder inmenging vanaf de grond hun eigen weg zoeken door het universum en zelf bepalen welke taken ze gaan verrichten.
Het Amerikaanse bureau voor ruimtevaart Nasa gaat volgend jaar een trio onbemande satellieten lanceren die autonoom beslissingen gaan nemen over hun eigen functioneren en activiteiten. Daartoe zijn computers aan boord met programmatuur die gebruik maakt van een vorm van kunstmatige intelligentie. Hun capaciteit is nog niet te vergelijken met die van de menselijke computer HAL-9000 in film en boek ‘2001: A Space Odyssey’ van Stanley Kubrick en Arthur Clarke. De vluchtleiding kan bijvoorbeeld op elk moment ingrijpen als dat nodig of gewenst is. Maar het staat voor de deur dat satellieten en onderzoeksrobots ver weg in het heelal aan het werk gaan en pas weer contact met de aarde tot stand brengen als foto’s, metingen en onderzoeksresultaten zijn door te geven.
De aankomende Nasa-missie heet Three Corner Sat. Ze bestaat uit drie identieke satellietjes die in formatie in een baan rond de aarde gaan vliegen voor het maken van stereo-foto’s met extreme dieptewerking en voor het testen van nieuwe technieken voor besturing en afhandeling van gegevens. Het worden zelfdenkende ruimtesondes. De programmatuur in de boordcomputers gaat onder meer de kwaliteit van gemaakte opnames beoordelen en alleen de beste foto’s naar de aarde doorsturen. Ook zullen de camera’s aan het werk worden gezet als sensoren bijzondere zaken waarnemen, zoals een vulkaanuitbarsting of extreme zonnevlammen. De software gaat op basis van hetgeen deze sensoren opmerken, bepalen hoe de missie wordt uitgevoerd. De drie satellieten zullen daartoe drie maanden min of meer aan hun lot worden overgelaten, hoewel de ontwerpers en bouwers natuurlijk wel uiterst nieuwsgierig zullen toekijken.
De toestellen houden onderling contact voor uitwisseling van gegevens, onder meer in verband met het formatievliegen. In ieder van de slechts vijftien kilogram wegende satellieten komen vier digitale camera’s. Gemiddeld zullen die 24 opnames per omloopbaan maken. Enkele uren nadat de gegevens beschikbaar zijn gekomen voor de wetenschappers, zijn de gegevens voor iedereen toegankelijk via internet.
Wat vooraf ging…
Onbemande satellieten draaien rond de aarde andere planeten in ons zonnestelsel om ons te vertellen wat er daar gaande is. Ze hangen ook op ogenschijnlijk vaste plaatsen voor het bestuderen van onze zon, voor het afhandelen van communicatie tussen de werelddelen en het versturen van televisiebeelden, en voor het verzamelen van gegevens voor weersvoorspellingen. Er zijn ruimtesondes met telescopen aan boord die in zichtbaar en onzichtbaar licht opnames maken van sterrenstelsels en allerlei fenomenen in het heelal, en die metingen doen aan stralingen die onze astronomen meer kunnen vertellen over wat zich in dat onmetelijke universum allemaal afspeelt.
Tot nu toe vlogen al die satellieten ‘blind’. Ze werden (en worden) rechtstreeks bestuurd door de vluchtleiding op aarde en zijn volledig afhankelijk van de opdrachten die ze krijgen. Een missie moet vooraf tot in details worden gepland. Als fouten aan het licht komen, als de omstandigheden tijdens de missie anders blijken te zijn dan gedacht of als nieuwe situaties ontstaan, dan moeten in die instructies wijzigingen worden aangebracht. Daartoe worden softwarepatches en soms zelfs compleet nieuwe software vanaf de aarde naar de satelliet opgestraald. Dat kan vele uren in beslag nemen en de kans op verminking van de reeksen nullen en enen – en daardoor op fouten of onregelmatigheden – is niet denkbeeldig
Het operationeel houden van een ruimtetoestel middels opdrachten vanaf de aarde maakt ook snelle reactie op wetenschappelijke kansen onmogelijk. Wanneer iets bijzonders aan de hand is, wordt dat door de vluchtleiding pas veel later opgemerkt. Dat komt door de tijd die radiosignalen nodig hebben om heen en weer te flitsen tussen satelliet en vluchtleidingscentrum, ook al gaat dat op lichtsnelheid, zo’n driehonderdduizend kilometer per seconde.
Een signaal naar onze eigen maan is bijvoorbeeld bijna twee seconden onderweg. Naar de planeet Mars duurt het al vijftien tot twintig minuten voor een commando er arriveert of een seintje van een ruimtesonde daarvandaan ons bereikt. Radiosignalen naar de planeet Jupiter zijn ruim drie kwartier onderweg. Een bijzondere gebeurtenis op de Jupitermaan Europa is dus allang weer voorbij als de signalering daarvan door de momenteel daar rondvliegende satelliet Galileo op aarde aankomt. Als die sonde gezien vanaf de aarde net achter een planeet zit of planeet plus ruimtetoestel achter de zon is verdwenen, is er tijdelijk helemaal geen contact mogelijk. Het zou dus een uitkomst zijn als het ruimtetoestel zelf kan beslissen of iets interessant genoeg is om te onderzoeken en vast te leggen.
Autonome besturing
Een zelfdenkende, zelfbeslissende en dus autonome ruimtesonde is een toestel waarin de software van de boordcomputer besluiten neemt over het functioneren van de satelliet. Volgens dr. Steve Chien, hoofdwetenschapper bij Nasa’s Jet Propulsion Laboratory (JPL) in Pasadena, Californië, werkt dat net als bij onze eigen hersenen. Die gebruiken informatie die door ogen en oren wordt aangedragen om er beelden en bijbehorende geluiden van te maken en op basis daarvan conclusies te trekken. De software van een autonome ruimtesonde gebruikt op dezelfde manier de data van sensoren als camera’s en meetinstrumenten om beslissingen te nemen over hoe de missie moet worden uitgevoerd.
Autonome besturing van een ruimtesonde is meer dan een automatische piloot van een vliegtuig. Volgens chef-ingenieur dr. Marc Rayman is automatische navigatie als een auto die zijn eigen weg uitstippelt van A naar B, zelf rijdt en zichzelf parkeert tot op dertig centimeter nauwkeurig bij de bestemming. Onderweg worden ook nog automatisch foto’s gemaakt van interessante objecten in de omgeving, waarvan alleen de beste in het digitale fotoalbum van de reis komen. Rayman is betrokken bij de missie Deep Space-1 van Nasa, waarin nieuwe technologieën inclusief zelfbeslissende software worden uitgetest.
Uitgangspunt van zelfdenkende software in autonome boordcomputers is dat de ruimtesonde kan functioneren zonder hulp vanaf de aarde. Daartoe worden flexibele planningen gebruikt die op basis van algemene doelen zijn opgesteld en die binnen tijdvensters moeten zijn uitgevoerd. De interne programmatuur vertelt het ruimtetoestel wat te doen en wanneer, en controleert of de instructies goed en succesvol zijn uitgevoerd. Ook signaleert zij eventuele problemen en verhelpt die voor zover dat mogelijk is.
Tot nu toe werden alle wetenschappelijke metingen, foto’s en gegevens, zowel goede als slechte en zowel bruikbare als onbruikbare, doorgeseind naar het vluchtleidingscentrum en de wetenschappers op aarde. Met autonome selectie aan boord van de onbemande satelliet hoeven minder gegevens te worden verzonden, wordt minder beslag gelegd op de zendcapaciteit van de sonde en wordt de energievoorziening gespaard. Wetenschappers op aarde hoeven niet meer door duizenden opnames te gaan om de ‘slechte’ en nauwelijks bruikbare foto’s en datapakketten eruit te filteren. Ze kunnen zich concentreren op de gegevens die een hoge prioriteit hebben; want alleen die worden doorgestuurd. Missies kunnen met minder vluchtleiders toe. De huidige, per stuk honderden miljoenen guldens kostende ruimtevaartondernemingen worden er goedkoper en efficiënter door. Naar verwachting zullen ze ook betere wetenschappelijke resultaten opleveren.
Op weg naar doelen
Zelfdenkend wil volgens het JPL niet zeggen dat er sprake is van intelligentie in de zin van wat wij mensen kunnen. Met zelfdenkende software heeft een ruimtesonde geen eigen wil, maar een betere mogelijkheid te analyseren wat er gaande is met het toestel zelf en met zijn plek in het heelal. Op basis van die bevindingen kan de boordcomputer zonodig taken en activiteiten aanpassen om de missiedoelen te kunnen halen.
De vluchtleiding geeft aan de software algemene doelen die aan het eind van een bepaalde periode moeten zijn gehaald. De programmatuur ontleedt die in kleinere taken. Vervolgens verzamelt de boordcomputer informatie over de voortgang van de vlucht, over de gesteldheid van het toestel en van de instrumenten aan boord, en over de situatie in de omgeving van de satelliet. Op basis daarvan stelt hij een programma op met taken en regels die tot de gestelde doelen moeten kunnen leiden. Omdat, aldus het JPL, de boordcomputer is geprogrammeerd om de missiedoelen te begrijpen en hij taken kan herleiden op basis van ingevoerde modellen en van de informatie die van de sensoren komt, is het ruimtevaartuig in staat in nieuwe situaties voor zichzelf te denken en op nieuwe manieren te handelen om ervan verzekerd te zijn dat die doelen kunnen worden gerealiseerd.
Als bijvoorbeeld als doel is gesteld een foto te verkrijgen van een bepaalde asteroïde, dan krijgt een camera in de traditionele situatie de opdracht een opname te maken op een vastgesteld tijdstip in een vooraf bepaalde richting. Of de astroïde dan ook echt in het zicht van de camera is, weet de vluchtleiding niet. Met de zelfdenkende software bepaalt de boordcomputer wanneer die foto het beste kan worden genomen. Dat is wanneer de asteroïde voor de cameralens zit en het licht onder een goede hoek valt, dus als de positie van de ruimtesonde ten opzichte van de asteroïde optimaal is.
De Galileo-satelliet bij Jupiter bijvoorbeeld zou meteen foto’s kunnen maken en metingen kunnen starten als de sensoren nieuwe barsten ontdekken in het ijs dat de maan Europa bedekt of een vulkaanuitbarsting zien op de gigantisch hete maan Io. Onder het ijs op Europa worden vloeibare oceanen vermoed waarin vormen van leven zouden kunnen zitten. Op Io is actief vulkanisme dat lijkt op dat van de Hawaï-eilanden.
Deze autonomie zorgt voor flexibiliteit in de missie en verhoogt daardoor de betrouwbaarheid en de kwaliteit. Als die asteroïde van daarnet merkwaardige straling zou afgeven, dan zou een sonde met een zelfdenkende boordcomputer meteen besluiten daaraan extra metingen te doen zonder op een commando van de aarde te wachten.
Nieuwe opnames worden vergeleken met voorgaande om te kijken of er veranderingen zijn opgetreden in de situatie buiten het ruimtetoestel. Zo worden bijzonderheden gevonden die van belang zijn voor de wetenschappers op aarde.
Storingen verhelpen
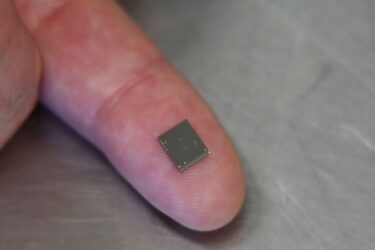
Om zelfdenkende software en autonome boordcomputers goed te kunnen laten functioneren, dient de ruimtesonde te beschikken over voldoende sensoren die registreren hoe het toestel, de onderdelen en de instrumenten zich gedragen en wat zich in de omgeving bevindt en afspeelt. Er zijn bijvoorbeeld voelers die aangeven of er stroom loopt door een elektrisch circuit, of kleppen open of dicht staan, schakelaars aan of uit, en ga zo maar door. De gegevens daarover zijn nodig voor het nemen van beslissingen, maar ze zijn ook nodig om te zien of alles naar behoren werkt.
Een deel van de zelfdenkende software is speciaal ontworpen om de ruimtesonde en alle instrumenten continu in de gaten te houden. De boordcomputer beschikt over alle gegevens van alle instrumenten, een ‘plaatje’ van de satelliet in topconditie, informatie over wat ze zouden moeten doen bij het uitvoeren van de onderhavige taken en hoe alle onderdelen met elkaar samenwerken. Voortdurend wordt de bestaande situatie vergeleken met de ideale zoals die in die modellen is vastgelegd. Komt daar een verschil uit, dan is er een fout, een storing of een probleem ontstaan. De module zal een voorstel doen voor correctie of verbetering van de situatie. Zo’n fout kan worden aangepakt zonder eerst de vluchtleiding te raadplegen.
Het kan hierbij gaan om een onjuist uitgevoerde opdracht of een niet verwacht resultaat daarvan. In zo’n situatie zal de zelfdenkende software een opdracht herhalen of, als dat beter is, de taak met een alternatieve methode laten uitvoeren. Hij kan ook dezelfde opdracht in een volgende planningsperiode opnieuw inprogrammeren om het nog eens te proberen. Kan de fout niet hersteld worden, dan zal de programmatuur de plannen aanpassen en strategieën uitwerken om de geplande opdracht toch zo goed mogelijk uit te voeren. Dat kan door bijvoorbeeld een backup te gebruiken of een ander instrument. Ook kan geprobeerd worden een bepaald onderdeel of een schakeling te omzeilen. Bij een ernstig probleem, zoals het uitvallen van de energievoorziening, zal de boordsoftware de ruimtesonde in stand-by zetten en niks meer doen tot nieuwe opdrachten van de vluchtleiding zijn ontvangen. Niets doen betekent dat alleen nog taken worden uitgevoerd die nodig zijn om ervoor te zorgen dat de sonde overleeft. In dit geval wordt daarvoor een backup-accu ingezet.
Was de ruimtesonde die in 1999 een landing op Mars moest maken, met dergelijke zelfdenkende software uitgerust, dan was de expeditie hoogstwaarschijnlijk niet mislukt. De programmatuur had dan een verschil gesignaleerd tussen de gegevens van de landingssensoren en die van de landingsradar. Ze had vervolgens kunnen ingrijpen door de brandingsduur van de landingsmotor aan te passen aan de gegevens van de landingsradar. Naar men vermoedt, gaven de sensoren in het landingsgestel te vroeg aan dat de Mars-bodem bereikt was en werd de landingsmotor daardoor te vroeg uitgezet. Neerstorten was het gevolg.
Om de vluchtleiding op aarde te laten weten hoe de conditie van de satelliet is en of alles nog naar wens verloopt, zendt het ruimtetoestel op vooraf afgesproken tijdstippen een radiosignaal uit. Dat ‘baken’ bestaat uit slechts één toon. De hoogte daarvan vertelt de vluchtleiders hoe het aan boord gesteld is. Hierdoor is het overzenden van lange reeksen telemetriegegevens overbodig.
Deep Space-1
Deze zelfdenkende software en autonome boordcomputersystemen zijn uitgebreid getest in de Nasa-ruimtesonde Deep Space-1. Deze is op 24 oktober 1998 gelanceerd en draait in een baan rond de zon. Belangrijkste taak was het testen van twaalf nieuwe technologieën. Daarbij waren de aandrijving met een elektrische ionen-motor, nieuwe zonnepanelen voor de opwekking van elektriciteit uit zonlicht, ultra-kleine elektronica, en de autonome software. Op 18 september 1999 werd de primaire missie afgesloten en kon worden vastgesteld dat alles uiteindelijk zeer succesvol werkte. De software bestuurde de satelliet een paar maal enkele dagen achtereen en dat gebeurde precies als verwacht.
Wetenschappelijk doel van de missie was het van dichtbij fotograferen van de asteroïde Braille. Dat gebeurde op 29 juli 1999. De sonde was toen 188 miljoen kilometer van de aarde vandaan. Deep Space-1 passeerde het hemellichaam op een afstand van 15,5 kilometer. De positie van de asteroïde bleek 430 kilometer verwijderd te zijn van de plaats waar de astronomen dachten dat hij was. Bovendien was hij veel zwakker in lichtweerkaatsing en dus veel moeilijker te ontdekken en herkennen dan gedacht. De autonome boordsoftware vond de asteroïde daardoor later dan bedoeld was. De computer kon toen de baan niet meer dicht genoeg langs het hemellichaam laten lopen. Het werd 15,5 in plaats van vijf kilometer. De sonde ‘ving’ de asteroïde echter wel en wist ernaartoe te sturen.
Momenteel is Deep Space-1 aan een verlenging van zijn missie bezig. Deze voert de sonde naar de komeet Borrelly. Voor de boordcomputer werd compleet nieuwe software geschreven. Daarmee kon het richtsysteem opnieuw worden ingesteld en werden instructies gegeven over het bestuderen van de komeet. Dat vergde het uploaden van precies 267 files, hetgeen vier dagen kostte. De sonde was toen ongeveer 320 miljoen kilometer verwijderd van de aarde.
In de nieuwe software zijn de ervaringen verwerkt die waren opgedaan tijdens het passeren van de asteroïde Braille over het gedrag van een ruimtevaartuig als het in de buurt komt van een ander hemellichaam. Asteroïden en kometen zijn zo klein, dat het vanaf de aarde moeilijk is locatie, omvang en vorm precies vast te stellen. De Deep Space-1 ruimtesonde moet dat dus zelf uitvogelen en uiteindelijk precies goed bij de komeet Borrelly uitkomen. In de nieuwe programmatuur is opgenomen dat de boordcomputer foto’s moet analyseren op zoek naar de komeetkern. Aan de hand daarvan zal de zelfdenkende software bepalen hoe de satelliet moet bewegen om de komeet in het zicht van de camera te houden.
Voor het bedrijfsleven
Delen van de zelfdenkende software zijn inmiddels beschikbaar gekomen voor het commerciële bedrijfsleven. Er zijn al toepassingen voor het beheren van distributienetwerken voor winkels en voor het besturen van de productie van computers, auto’s, computerchips en schoenen.
Volgens Nasa zijn de computer- en softwaretechnologieën voor het betrouwbaar opzetten van zelfdenkende en autonoom handelende ruimtesondes pas recent beschikbaar gekomen. Modules uit deze programmatuur kunnen ook voor andere toepassingen in de ruimtevaart worden gebruikt, zoals geautomatiseerde grond- en volgstations, autonome karretjes op andere planeten en manen, en autonome gerobotiseerde vliegtoestellen.
Zelfdenkende software zal het mogelijk maken dat de oceanen onder het ijs op Jupitermaan Europa worden onderzocht met een robot die zelf beslissingen neemt. Want als deze eerst moet wachten op commando’s vanaf de aarde, dan kan dat desastreuze gevolgen hebben. De robot zal maar een groot onderwaterbos van wierachtige begroeiing tegenkomen en de opdracht hebben rechtdoor te blijven gaan. Als het toestel dan niet zelf zou kunnen beslissen om af te buigen, dan zou het in dat woud verstrikt raken. De missie komt dat voortijdig tot een einde en we zullen hier op aarde nooit te weten komen dat de robot leven op Europa had gevonden…
Ronald De Lange Freelance Medewerker