

Bij mechanische robots denken de meeste mensen of aan beelden uit Terminator of aan robots in fabrieken, maar vermoedelijk zullen er eerder meer zwermrobots of 'insecten'-robots op de wereld zijn dan terminators of zelfs de al veel voorkomende fabrieksrobots. Alleen is het wel lastig die microdrones te laten communiceren met elkaar zonder dat het veel rekenkracht kost en daar heeft de TU Delft nu een mogelijke oplossing voor gevonden met signaalsterktemetingen.
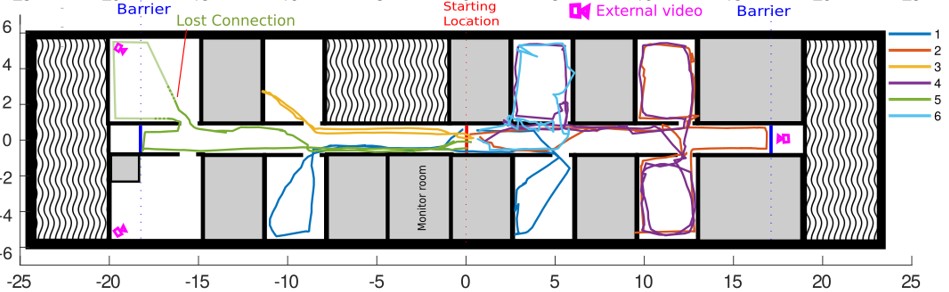
De robots waar het hier om gaat zijn zogenaamde ‘zwermrobots’, ofwel kleine, autonome robots die maar een paar dingen moeten kunnen, namelijk vliegen en nergens tegenaan vliegen, samen met het specifieke doel waarvoor ze ontwikkeld zijn. In het geval van dit onderzoek het vinden van twee dummiepoppen in acht kamers op een kantoorverdieping met behulp van kleine cameraatjes. Het onderzoeksartikel verscheen in Science Robotics
Zwermrobots
Ze kunnen heel praktisch zijn in het onderzoeken van onbekende omgevingen binnenshuis. Door hun kleine formaat kunnen ze bijna overal naar binnen en bewegen in kleine ruimtes. Een ander voordeel van de kleine en vooral ook lichte, slechts 33 gram, robots is dat ze veilig zijn om rond mensen hun opdracht uit te voeren. Een grote uitdaging was tot nu toe dat ze te weinig rekenkracht hebben om echt de omgeving in kaart te brengen. Deze studie laat zien hoe door middel van het zogenaamde swarm gradient bug algorithm (sgb-algoritme) de robots met minimale middelen goed kunnen navigeren in een onbekende omgeving.
De robots navigeren in verschillende richtingen vanaf het basisstation en weten statische objecten te ontwijken door visuele input van simpele sensors. Vervolgens volgen ze gewoon de muur om nergens tegenaan te vliegen en gaan door de eerste de beste opening heen. Daarnaast communiceren ze met elkaar om botsingen te voorkomen, maar ook om niet allemaal dezelfde kant op te gaan. Op die manier wordt de maximale zoekefficientie bereikt. Dit geheel heeft de universiteit in een proof-of-concept laten zien dat het werkt.
Werking sgb-algoritme
Promovenda Kimberly McGuire legt in een bericht op de site van de TU Delft uit hoe het sgb-algoritme werkt: ´Zulke algoritmes maken geen plattegrond van de omgeving met daarin obstakels, maar ontwijken obstakels gewoon wanneer ze die tegenkomen. In principe is een gedetailleerde plattegrond heel handig, omdat een robot dan van het ene punt op de kaart naar het andere kan navigeren volgens een optimale route, maar voor kleine robots is het te duur om zo’n plattegrond te maken. Het voorgestelde bug algorithm levert minder efficiënte routes op, maar heeft als voordeel dat het ook in piepkleine robots kan worden geïmplementeerd.”
De focus van dit onderzoek was search & rescue, maar de onderzoekers zien ook andere mogelijkheden, zoals het bijhouden van voorraden in grote opslaglocaties, of het monitoren van gewassen in de glastuinbouw.






